This dates back to my early teen years as you can see by the faded pages torn from an exercise book.
I wanted to make something better than a conventional tracked vehicle – one that would really go anywhere and not destroy roads if used on them.
The basic idea was to design a single huge track that would have vertical axis hinges as well as the usual horizontal hinges of tracks. This would then be fitted to a frame with rollers, guide wheels etc. that would “bend” to enable cornering.
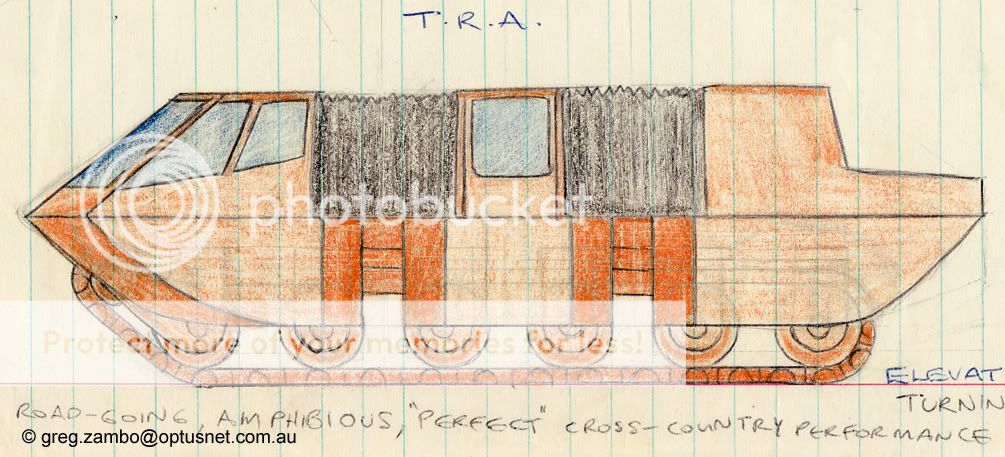 |
| [Side view of TRA mk.1] |
The main advantage of the design is that it would go over anything: mud, water, sand, anything: the whole bottom surface of it is tractive so the weight distribution will be lower than anything else by a major factor. This machine would cruise over sand dunes you can't walk on. Deep snow likewise.
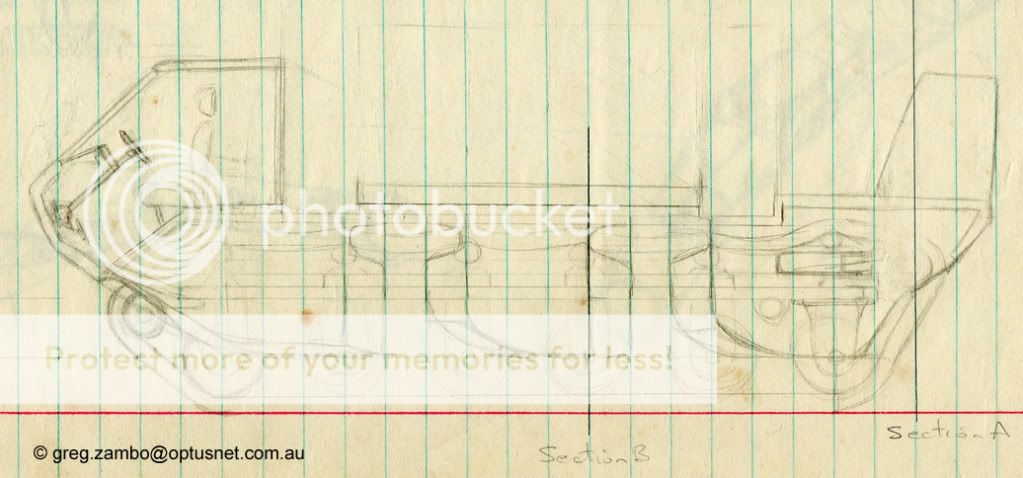 |
| [Side section of TRA] |
 |
| [Plan view showing cargo area and cabin] |
 |
| [Plan view of vehicle cornering] |
 |
| [Cross-section showing track wheels and drive system] |
There are problems with this idea: first, that track is going to be heavy. Even shaving weight with modern composites it will still be a significant mass in motion and that means more horsepower needed to move it: win some, lose some.
The next matter to consider is turning circle: I have tried to make it as tight as possible but there is a real limit to how narrow you can go. Ingenious overlapping plates on the ends of the track links would allow some tightening. You also need to provide a graduated turning system for perfect cornering: a corner should start at the front of the machine and progress to the rear (if you get the idea).
Suspension could be provided with the use of springing on the main wheels and some might also be provide by making the track links themselves springy - but too much in either area could result in failure of the track system.
Keeping the track on it's rollers and wheels could be a major issue since the track flexes in more than one plane: adding the shape changes of running over uneven ground and the need for a spring tensioner at one end of the track loop you are looking at some pretty fancy issues there - I still think it could be done though.
The TRA Mk.2
The Mk.1 design looked okay but the track seemed to take up a lot of space in the machine and I liked the idea of being able to lower the total weight and area used by using a sneaky design modification – so the Mk.2 was born.
My approach was to consider the track as a zigzag that could e either stretched out or compacted. In the stretched state the track feet attached to zigzag links by long arms would all fold into a narrow channel while also decreasing the overall weight of the track loop since the stretched section needs less links to go the same distance. On the front end a driven track pulley would pull the stretched links from the back and compact them into the wide layout for use underneath the vehicle. On the bottom of the vehicle, runners for the track would ensure that it stayed open.
The drawings show the basic idea but the design was never finished properly: unlike the simpler design, I was not happy with the second hinge axis problem created by this type of track.
 |
| [Mk.2 track shown extended] |
 |
| [Mk.2 track system in cross section with wheels and rollers] |
Now, I could mess with the part shapes in my 3D modelling software to improve or disprove the idea. Still there it is folks, anyone wants it, go ahead, just mention me somewhere okay?


